Robot sheepdog technology could be used to save people from burning buildings

It may sound like a scene from a 1970s sci-fi movie, but in the not-too-distant future, robots could be leading crowds out of burning buildings guided by a shepherding device.
Researchers from Swansea University have developed a mathematical shepherding model which they say paves the way for a robot that can gather and herd livestock, control crowds and even clean up the environment.
The model was developed by fitting a flock of sheep and their dog with backpacks containing extremely accurate GPS devices, recording all movements and analysing the results using computer simulations.
The resulting algorithm comprises a series of equations that can be used to tell a robot shepherd where to move to round up and drive its flock towards their destination, every step of the way.
“This could be used in a variety of situations. For example in a smoky room where people can’t see the exit, a robot could direct people towards the exit. The robot could be stationed in the corner of a room and be activated by a fire alarm,” said Dr Andrew King, of Swansea University, who worked on the research.
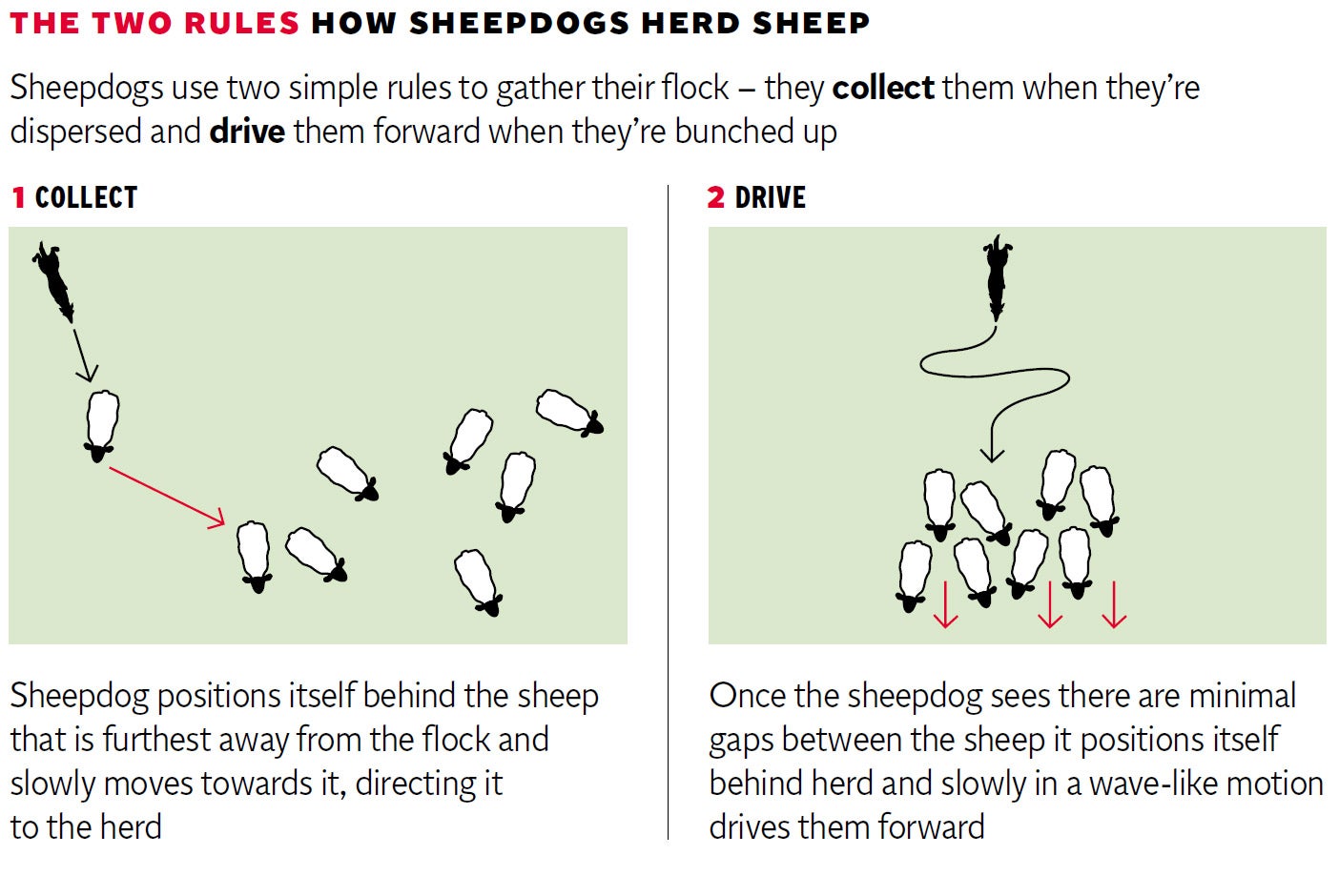
Not surprisingly, the researchers found that sheepdogs use two simple rules to gather their flock – they collect them when they’re dispersed and drive them forward when they’re bunched up. Individual sheep seek to reduce their own risk from a potential predator by moving towards the centre of the flock until they get to close to the others, at which point they move slightly apart.
But the resulting equations that describe this logical behaviour is far more complex.
“We had to think about what the dog could see to develop our model. It basically sees white, fluffy things in front of it. If the dog sees gaps between the sheep, or the gaps are getting bigger, the dog needs to bring them together,” said Dr King.
“At every time step in the model, the dog decides if the herd is cohesive enough or not. If not cohesive, it will make it cohesive, but if it’s already cohesive the dog will push the herd towards the target,” added Daniel Strombom of Uppsala University in Sweden, who analysed the data and helped develop the model.
By analysing the decisions the dog is constantly making about the size of the gaps, the number of sheep, the moves it made each step of the way and when the flock was cohesive enough to move forward, the researchers were able to come up with the model.
Other uses for a robot programmed with the mathematical shepherding model include keeping animals away from places they are not wanted. It could also be used to guide groups of robots, used to clean up marine oil spills, or to gather them after they have collected data on the environment and need to be brought back, Mr Strombom said.
The model he has created allows a single “shepherd” to herd a flock of about 100 individuals.
“If you watch sheepdogs rounding up sheep, the dog weaves back and forth behind the flock in exactly the way that we see in the model,” Dr King added.
The experiments were conducted on a flock of 46 three-year-old female marino sheep and a trained female Australian Kelpie working farm dog. All trials were undertaken in South Australia and the sheep were housed in a 5 hectare field with constant access to hay and water.
The research is published in the Journal of the Royal Society Interface and also involved the Royal Veterinary College, which designed the GPS backpacks for the sheep.
Join our commenting forum
Join thought-provoking conversations, follow other Independent readers and see their replies
Comments