Tiny ‘paper bird’ robot can perform operations inside the human body
Magnets allow scientists to remotely control robot to perform flapping and sliding motions

Scientists have developed a “paper bird” robot that is small enough to fit inside the human body to perform operations.
Built by researchers at the Paul Scherrer Institute in Zurich, the microscopic robots use tiny, programmable magnets for it to be controlled remotely.
Unlike traditional robots, the microbot uses soft materials that allow it to navigate flexible structures such as blood vessels, with a design inspired by origami paper birds.
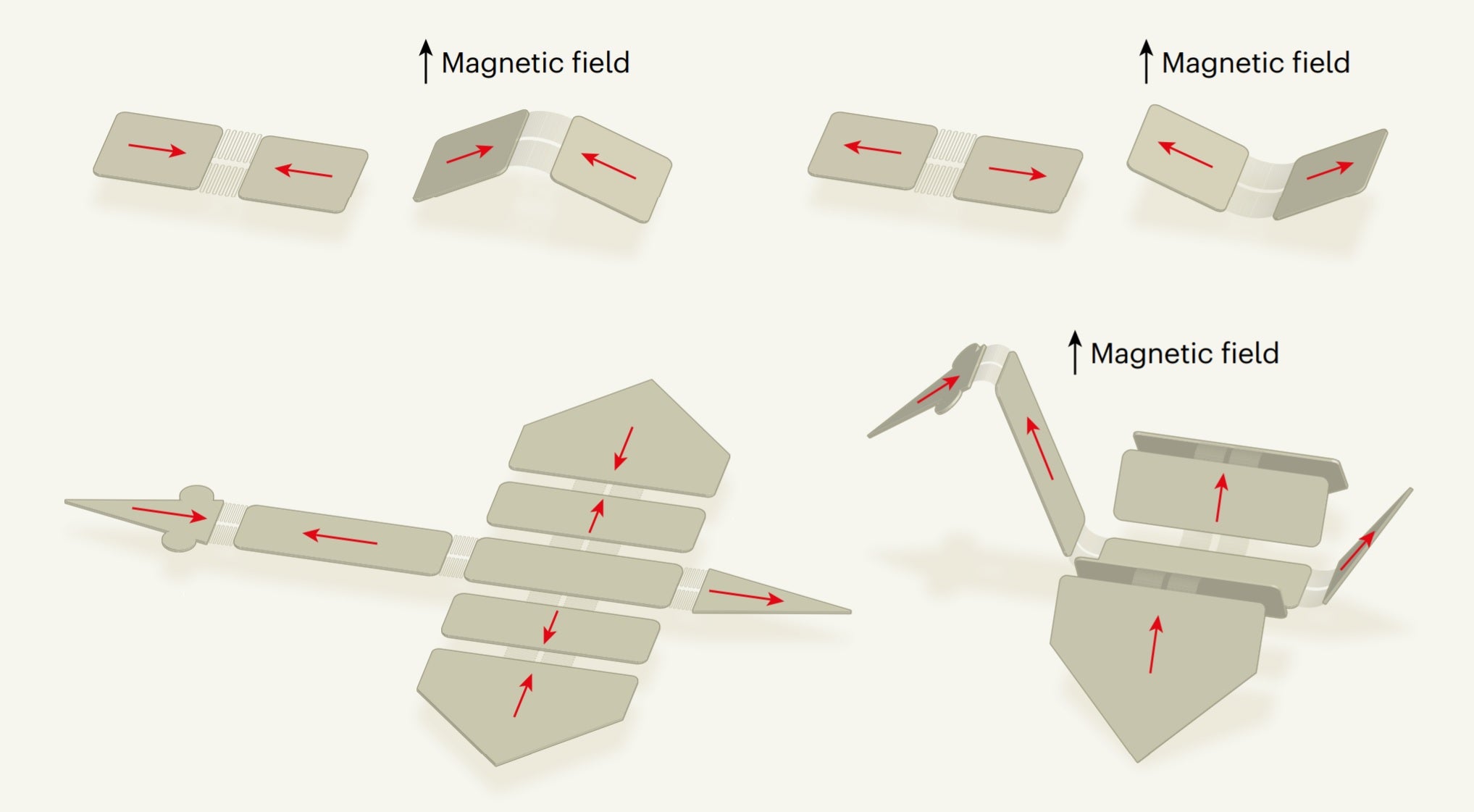
“The movements performed by the microbot take place within milliseconds,” said Laura Heyderman, head of the Laboratory for Multiscale Materials Experiments at PSI.
“But programming of the nanomagnets only takes a few nanoseconds. This makes it possible to program the different movements one after the other.
“This means that the tiny microbird can first flap its wings, then slip to the side and afterwards flap again. If needed, the bird could also hover in between.”
Magnetic soft robots have previously been developed for biomedical uses, such as self-folding robots capable of crawling through the human gut, patch wounds, and dislodge swallowed objects.
Small, capsule-shaped robots have also been created that are capable of rolling along the inner surface of the stomach in order to perform biopsies and deliver medicine.
Details of the microbot are published in the scientific journal Nature, with the scientists noting that more work needs to be done in order to achieve the robots’ full potential.
One way they say that control of the robot could be improved is through artificial intelligence, which also could be used to assist image analysis of the robot as they perform their tasks.
Finally, methods need to be developed in order to safely retrieve the robots once the operation is complete.
Join our commenting forum
Join thought-provoking conversations, follow other Independent readers and see their replies
Comments
Bookmark popover
Removed from bookmarks